鞍点¶
定义¶
一个不是局部最小值的驻点(一阶导数为0的点)称为鞍点。数学含义是:目标函数在此点上的梯度(一阶导数)值为 0,但从改点出发的一个方向是函数的极大值点,而在另一个方向是函数的极小值点。
判断¶
判断鞍点的一个充分条件是:函数在一阶导数为零处(驻点)的黑塞矩阵为不定矩阵。
1.黑塞矩阵¶
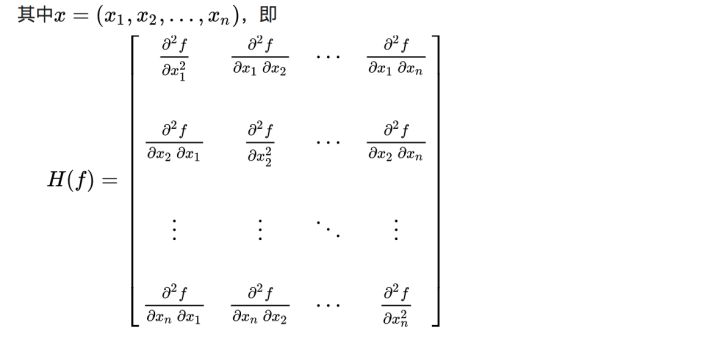
在数学中,黑塞矩阵(Hessian matrix 或 Hessian)是一个多变量实值函数的二阶偏导数组成的方阵(类似于多元函数的二阶导数),假设有一实数函数f(x1,x2,x3...xn),如果f所有的二阶偏导数都存在,那么黑塞矩阵表示如下:
2.不定矩阵¶
-
半正定矩阵:所有特征值为非负。
-
半负定矩阵:所有特征值为非正。
-
不定矩阵:特征值有正有负。
例子¶
下面对函数z=x2+y2的驻点(0,0)判断是否为鞍点。函数图像如下:
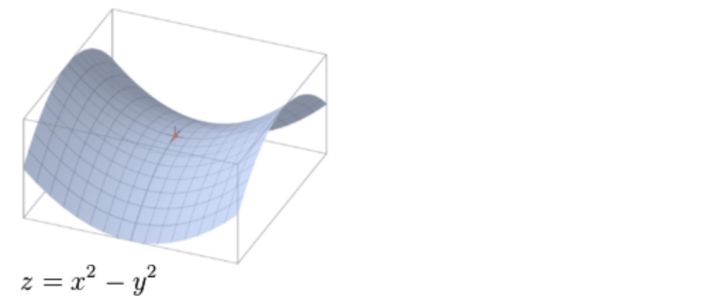
我们根据定义来判断(0,0)点的黑塞矩阵:
我们容易求得二元函数z=x2+y2在驻点 (0,0) 处的 Hessian 矩阵形式为:

容易解出特征值一个为2,一个为-2(有正有负),显然是不定矩阵,所以该点是鞍点!
注意:函数在一阶导数为零处(驻点)的黑塞矩阵为不定矩阵只是判断该点是否为鞍点的充分条件,也就是说函数在一阶导数为零处(驻点)的黑塞矩阵不满足不定矩阵的定义,也不一定能够说明它不是鞍点。
比如在z=x2+y2点 (0,0)处的 Hessian 矩阵是一个 0 矩阵,并不满足是不定矩阵,但是它是一个鞍点。